关键词 :
上一篇 : 护航低空经济“高飞” 低空智联网迎多方布局
下一篇 : 最后一页
经过前期筛选,现诚邀您参加AI面试欢迎参加非技术类AI面试请用手机进行AI视频面试……正值秋招,不少求...
新华网 11-01 10:07:29

经过前期筛选,现诚邀您参加AI面试欢迎参加非技术类AI面试请用手机进行AI视频面试……正值秋招,不少求...
新华网 11-01 10:07:29
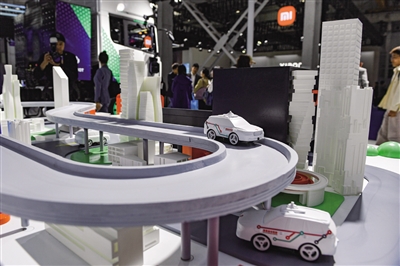
  图为2024世界智能网联汽车大会展示的自动驾驶智能沙盘。记者 陈钟昊 摄  作为...
经济参考报 11-01 09:51:57
  图为2024世界智能网联汽车大会展示的自动驾驶智能沙盘。记者 陈钟昊 摄  作为...
经济参考报 11-01 09:51:57

按下shift按键先找到并按下你的电脑键丽珠盘上面的shift按键,切换到英文输入法状态。键盘下划线怎么打?...

word中_________上打字的方法如下:1、进入word2010,在要设置下划线的位置输入空格,然后选中空格,点...

word横线上打字横线往后移怎么办?选中横线跑的文字,找到输入文字后横线跑的那几个文字,选中文字。查看...
大熊猫有天敌吗?答案是肯定的。野生大熊猫最大的天敌就是豺,确切的说是四川豺。四川豺主要分布在我国的...

充电桩安装需要什么条件?1、运营充电桩需要电动车使用人数多,小区充电使用率到达一定程度,如果使用率...
联系我们:55 16 53 8@qq.com
关于我们| 联系方式| 版权声明| 供稿服务| 友情链接
经济头条 版权所有,未经书面授权禁止使用
Copyright©2008-2020 By www.jingji.net All Rights Reserved


 营业执照公示信息
营业执照公示信息